Arduino APIs
The Coral Dev Board Micro is compatible with the core Arduino programming langauge. So a lot of simple Arduino projects can work on the Dev Board Micro without any code changes.
This page describes additional APIs that provide Arduino-style programming for Dev Board Micro hardware, such as the camera and microphone, plus descriptions for features that use standard Arduino libraries, such as GPIOs and the filesystem.
Even the APIs that have custom implementations for the Dev Board Micro are designed to allow code-reuse with other Arduino projects that use similar libraries whenever possible.
To try programming with Arduino for the Dev Board Micro, start by following the guide to Build apps with Arduino.
Camera
The Dev Board Micro includes an on-board camera module with 324 x 324 px
resolution. To use the camera with Arduino, you need to use the global instance
of the CameraClass object called Camera.
To get started, you just need to call
begin() and specify the image format
you want, such as the image resolution and rotation.
When you want to capture an image, call
grab()
and pass it a buffer where the image should be stored.
When you’re done, call
end to turn the camera off.
Example:
#include <coralmicro_SD.h>
#include <coralmicro_camera.h>
#include <libs/libjpeg/jpeg.h>
#include <cstdint>
#include <memory>
#include "Arduino.h"
using namespace coralmicro::arduino;
FrameBuffer frame_buffer;
void setup() {
Serial.begin(115200);
SD.begin();
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino Camera!");
int width = 324;
int height = 324;
if (Camera.begin(width, height) != CameraStatus::SUCCESS) {
Serial.println("Failed to start camera");
return;
}
if (!Camera.grab(frame_buffer) == CameraStatus::SUCCESS) {
return;
}
Serial.println("Saving image as \"image.jpeg\"");
std::vector<uint8_t> jpeg;
coralmicro::JpegCompressRgb(frame_buffer.getBuffer(), width, height,
/*quality=*/75, &jpeg);
SDFile imageFile = SD.open("image.jpeg", FILE_WRITE);
imageFile.write(jpeg.data(), jpeg.size());
imageFile.close();
}
void loop() {}
-
namespace
coralmicro¶ -
namespace
arduino¶ -
class
CameraClass¶ - #include <coralmicro_camera.h>
Exposes the Coral Micro device’s native camera.
You should not initialize this object yourself; instead include
coralmicro_camera.hand then use the globalCamerainstance.Public Functions
-
int
begin(CameraResolution resolution = CAMERA_R324x324)¶ Starts the camera.
- Parameters
resolution – A
CameraResolutionvalue representing the camera’s resolution.- Returns
A
CameraStatusvalue such asSUCCESSonce initialization has completed.
-
int
begin(int32_t width = 320, int32_t height = 320, CameraFormat fmt = CameraFormat::kRgb, CameraFilterMethod filter = CameraFilterMethod::kBilinear, CameraRotation rotation = CameraRotation::k270, bool preserve_ratio = false, bool auto_white_balance = true)¶ Starts the camera.
- Parameters
width – The resolution width in pixels.
height – The resolution height in pixels.
fmt – The image format.
filter – The bayer filtering method.
rotation – The image rotation amount.
auto_white_balance – Applies auto white balance if true.
- Returns
SUCCESSonce initialization has completed.
-
int
grab(uint8_t *buffer)¶ Grabs a camera frame.
- Parameters
buffer – The buffer where the frame will be stored.
- Returns
A
CameraStatusvalue such asSUCCESSif a frame was captured from the camera,NOT_INITIALIZEDif the camera was not initialized, orFAILUREif a frame was not captured.
-
int
grab(FrameBuffer &buffer)¶ Grabs a camera frame.
- Parameters
buffer – The buffer where the frame will be stored.
- Returns
A
CameraStatusvalue such asSUCCESSif a frame was captured from the camera,NOT_INITIALIZEDif the camera was not initialized, orFAILUREif a frame was not captured. Note: buffer does not have to be allocated, this function will automatically allocate the memory needed to store the image data.
-
int
setStandby(bool enable)¶ Changes the camera mode.
- Parameters
enable – Sets the camera to standby mode if true, and sets the camera to streaming mode if false.
- Returns
A
CameraStatusvalue such asSUCCESSonce the camera mode is set.
-
int
setTestPattern(bool enable, bool walking)¶ Changes the camera’s test pattern. Test pattern data is fake data that replaces camera sensor data when the value is not
NONE.- Parameters
walking – Sets the test pattern to
WALKING_ONESif true, and toNONEif false.enable – Starts test pattern if true, else only set the test pattern.
- Returns
A
CameraStatusvalue such asSUCCESSonce the pattern has been set.
-
int
setTestPattern(bool enable, coralmicro::CameraTestPattern pattern)¶ Changes the camera’s test pattern. Test pattern data is fake data that replaces camera sensor data when the value is not
NONE.- Parameters
pattern – The desired new test pattern.
enable – Starts test pattern if true, else only set the test pattern.
- Returns
A
CameraStatusvalue such asSUCCESSonce the pattern has been set.
-
int
setPreserveRatio(bool preserve_ratio)¶ Sets whether the image’s aspect ratio is preserved.
- Parameters
preserve_ratio – Images will be scaled to preserve aspect ratio if true.
- Returns
A
CameraStatusvalue such asSUCCESSonce the configuration has been set.
-
int
setPixelFormat(coralmicro::CameraFormat fmt)¶ Sets the image format.
- Parameters
fmt – The image format.
- Returns
A
CameraSttusvalue such asSUCCESSonce the format has been set.
-
int
discardFrames(int num_frames)¶ Discards a set amount of frames captured by the camera.
- Parameters
num_frames – The amount of frames to discard.
- Returns
A
CameraStatusvalue such asSUCCESSonce the camera has started discarding frames.
-
int
enableMotionDetection(md_callback_t callback = nullptr, void *cb_param = nullptr)¶ Enables or disables HW motion detection.
- Parameters
callback – The function to call when the camera detected motion.
cb_param – The callback parameter.
-
int
disableMotionDetection()¶ Disables motion detection.
-
int
setMotionDetectionWindow(uint32_t x, uint32_t y, uint32_t w, uint32_t h)¶ Sets the motion detection windows.
- Parameters
x – The top left x coordinate to monitor motion detection.
y – the top left y coordinate to monitor motion detection.
w – The width of the window to monitor for motion.
h – the height of the window to monitor for motion.
-
int
-
class
FrameBuffer¶ - #include <coralmicro_camera.h>
Represents an image’s frame buffer.
Public Functions
-
FrameBuffer()¶ Constructs a new frame buffer object without allocating framebuffer pointer.
-
~FrameBuffer()¶ Destroys and delete the frame buffer if it is allocated. Note: The buffer must be allocated with
new []and notmalloc().
-
uint32_t
getBufferSize()¶ Gets the frame buffer size.
- Returns
The buffer’s size.
-
uint8_t *
getBuffer()¶ Gets the frame buffer’s data.
- Returns
The pointer to the frame buffer’s data.
-
void
setBuffer(uint8_t *buffer, uint32_t frame_size)¶ Set the frame buffer’s data.
- Parameters
buffer – The frame buffer pointer to set.
frame_size – The frame buffer size to set.
-
bool
hasFixedSize()¶ Checks if the frame buffer has a fixed size.
- Returns
true if the frame buffer has been allocated and the size is known.
-
bool
isAllocated()¶ Checks if the frame buffer is allocated.
- Returns
true if the framebuffer is allocated, else false.
-
Enums
Typedefs
-
using
md_callback_t= void (*)(void *param)¶ Motion detection callback.
-
class
-
namespace
Variables
-
coralmicro::arduino::CameraClass
Camera¶ This is the global
CameraClassinstance you should use instead of creating your own instance.
Microphone
The Dev Board Micro includes one on-board pulse-density modulation (PDM)
microphone. To use the microphone with Arduino, you need to use the global
instance of the global instance of the PDMClass
object called Mic.
This API is designed to be code-compatible with projects that use the
Arduino PDM library,
but it does not support setGain() and setBufferSize().
To get started, specify a
callback function with onReceive(),
to be notified whenever the microphone has new data to read.
Then call begin() to start recording
with the microphone. Inside the function you passed to
onReceive(), read the available audio
data with read().
The microphone remains powered and processes input whenever there is an active audio callback.
When you’re done with the microphone, call
end() to disable the micrphone.
Example:
This code listens to input from the microphone and saves data into a
currentSamples buffer.
#include "Arduino.h"
#include "PDM.h"
volatile int samples_read = 0;
std::vector<int32_t> current_samples;
void setup() {
Serial.begin(115200);
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino PDM!");
Mic.onReceive(onPDMData);
Mic.begin();
}
void loop() {
if (samples_read) {
samples_read = 0;
Serial.println(current_samples[0]);
}
}
void onPDMData() {
samples_read = Mic.available();
if (samples_read) {
current_samples.clear();
Mic.read(current_samples, samples_read);
}
}
-
namespace
coralmicro -
namespace
arduino -
class
PDMClass¶ - #include <PDM.h>
Exposes the Coral Micro device’s native PDM microphone.
You should not initialize this object yourself; instead include
PDM.hand then use the globalMicinstance.Public Functions
-
int
begin(int sample_rate = 16000, size_t sample_size_ms = 1000, size_t drop_first_samples_ms = 150)¶ Start recording data with the PDM microphone.
- Parameters
sample_rate – The sample rate to start, only supports 16000 or 48000.
sample_size_ms – Number of ms of data that is stored in the internal buffer.
drop_first_samples_ms – Number of ms to drop during begin to avoid distortions.
- Returns
0 on failure, 1 on success.
-
void
onReceive(void (*function)(void))¶ Sets the current audio callback function. The microphone starts as soon as
begin()is called, however this function adds an extra callback that gets executed as soon as new data are received. Within the callback, you can callavailable()andread()to access the microphone data.- Parameters
function – The function to call when audio data is received. The function should not have any arguments and not have a return value.
-
void
end()¶ Removes the current callback, effectively turning off the microphone.
-
int
available()¶ Gets the amount of available data in the audio buffer. Data is stored in the buffer as
uint32_ts, and the sizes in this function refer to the amount of values in the buffer.- Returns
The amount of data values stored in the underlying buffer that are ready to be read.
-
int
read(std::vector<int32_t> &buffer, size_t size)¶ Reads data from the audio buffer. Data is stored in the buffer as
uint32_ts, and the sizes in this function refer to the amount of values in the buffer.- Parameters
buffer – The buffer that will receive the copied audio data.
size – The amount of audio data values to copy.
- Returns
The amount of audio data values that were copied.
-
int
-
class
-
namespace
Variables
-
coralmicro::arduino::PDMClass
Mic¶ This is the global
PDMClassinstance you should use instead of creating your own instance.
Filesystem
This API allows you to create, read, and write files on the Dev Board Micro flash storage.
This API is designed to be code-compatible with projects that use the Arduino SD library. However, on the Dev Board Micro, these APIs enable reading and writing files on the on-board flash memory (not an SD card).
-
namespace
coralmicro -
namespace
arduino -
namespace
SDLib¶ -
class
File: public Stream¶ - #include <coralmicro_SD.h>
Represents a file in the flash memory filesystem (represented by
SDClass).Public Functions
-
File(void)¶
-
virtual size_t
write(uint8_t)¶ Writes one byte to the file.
- Parameters
val – The byte to write.
- Returns
The amount of data written.
-
virtual size_t
write(const uint8_t *buf, size_t size)¶ Writes data to the file.
- Parameters
buf – The data to write.
size – The size of the data.
- Returns
The amount of data written.
-
virtual int
read()¶ Reads one value from the file.
- Returns
The value read from the file.
-
virtual int
peek()¶ Gets the next value in the file, without advancing through the file.
- Returns
The next value in the file.
-
virtual int
available()¶ The amount of data left in the file.
- Returns
The amount of data until the end of the file, given the current position.
-
virtual void
flush()¶ Ensures the data is written to the file.
-
int
read(void *buf, size_t nbyte)¶ Reads data from the file.
- Parameters
buf – The buffer to store the data.
nbyte – The amount of data to read.
- Returns
The amount of data read.
-
bool
seek(size_t pos)¶ Sets the current position of the reader within the file.
- Parameters
pos – The desired index for reading from the file.
-
size_t
position()¶ Gets the current position of the reader within the file.
- Returns
The position of the reader.
-
size_t
size()¶ Gets the size of the file.
- Returns
The size of the file.
-
void
close()¶ Closes the file.
-
inline
operator bool()¶ Uses the file object as a bool to determine whether it is open.
- Returns
True if the file is open; false otherwise.
-
char *
name()¶ Gets the name of the file.
- Returns
The name of the file.
-
inline bool
isDirectory(void)¶ Determines whether the file object is a directory.
- Returns
True if the file object is a directory, false otherwise.
-
File
openNextFile(uint8_t mode = FILE_READ)¶ Gets the next file or folder if the current file object is a directory
- Parameters
mode – The mode for opening the file.
- Returns
The next file object opened with the given mode if it exists. Otherwise, returns an empty file object.
-
void
rewindDirectory(void)¶ Returns to the first file in the directory.
-
-
class
SDClass¶ - #include <coralmicro_SD.h>
Exposes the Dev Board Micro’s internal filesystem, treating it as if it were an SD card.
You should not initialize this object yourself; instead include
coralmicro_SD.hand then use the globalSDinstance.begin()andend()are unnecessary calls, because the filesystem is initialized when the device boots up and cannot be deinitialized. Example code can be found insketches/SDFileSystemTest/.Public Functions
-
bool
begin(uint8_t csPin = DONT_CARE)¶ This function is unused and is here to match the Arduino API.
- Parameters
csPin – Unused and is here to match the Arduino API.
- Returns
True if initialization was successful, false otherwise.
-
inline bool
begin(uint32_t clock, uint8_t csPin)¶ This function is unused and is here to match the Arduino API.
- Parameters
csPin – Unused and is here to match the Arduino API.
clock – Unused and is here to match the Arduino API.
- Returns
True if initialization was successful, false otherwise.
-
inline void
end()¶ This function is unused and is here to match the Arduino API.
-
File
open(const char *filename, uint8_t mode = FILE_READ)¶ Opens the file or directory at the given path
- Parameters
filename – The path of the file object.
mode – The mode for opening the file object.
- Returns
The opened file object.
-
inline File
open(const String &filename, uint8_t mode = FILE_READ)¶ Opens the file or directory at the given path
- Parameters
filename – The path of the file object.
mode – The mode for opening the file object.
- Returns
The opened file object.
-
bool
exists(const char *filepath)¶ Determines whether a file or directory exists at the given path.
- Parameters
filepath – The path to check for a file.
- Returns
True if a file exists at the path; false otherwise.
-
inline bool
exists(const String &filepath)¶ Determines whether a file or directory exists at the given path.
- Parameters
filepath – The path to check for a file.
- Returns
True if a file exists at the path, false otheriwse.
-
bool
mkdir(const char *filepath)¶ Creates a directory at the given path.
- Parameters
filepath – The location to make a directory.
- Returns
True if a directory was successfully created, false otherwise.
-
inline bool
mkdir(const String &filepath)¶ Creates a directory at the given path.
- Parameters
filepath – The location to make a directory.
- Returns
True if a directory was successfully created, false otherwise.
-
bool
remove(const char *filepath)¶ Removes the file at the given path
- Parameters
filepath – The location of the file to remove.
- Returns
True if a file was successfully removed, false otherwise.
-
inline bool
remove(const String &filepath)¶ Removes the file at the given path
- Parameters
filepath – The location of the file to remove.
- Returns
True if a file was successfully removed, false otherwise.
-
bool
rmdir(const char *filepath)¶ Removes the directory at the given path
- Parameters
filepath – The location of the directory to remove.
- Returns
True if a directory was successfully removed, false otherwise.
-
inline bool
rmdir(const String &filepath)¶ Removes the directory at the given path
- Parameters
filepath – The location of the directory to remove.
- Returns
True if a directory was successfully removed, false otherwise.
-
bool
-
class
-
namespace
-
namespace
Typedefs
-
typedef coralmicro::arduino::SDLib::File
SDFile¶
Variables
-
coralmicro::arduino::SDLib::SDClass
SD¶ This is the global
SDClassinstance you should use instead of creating your own instance.
I/O pins & LEDs
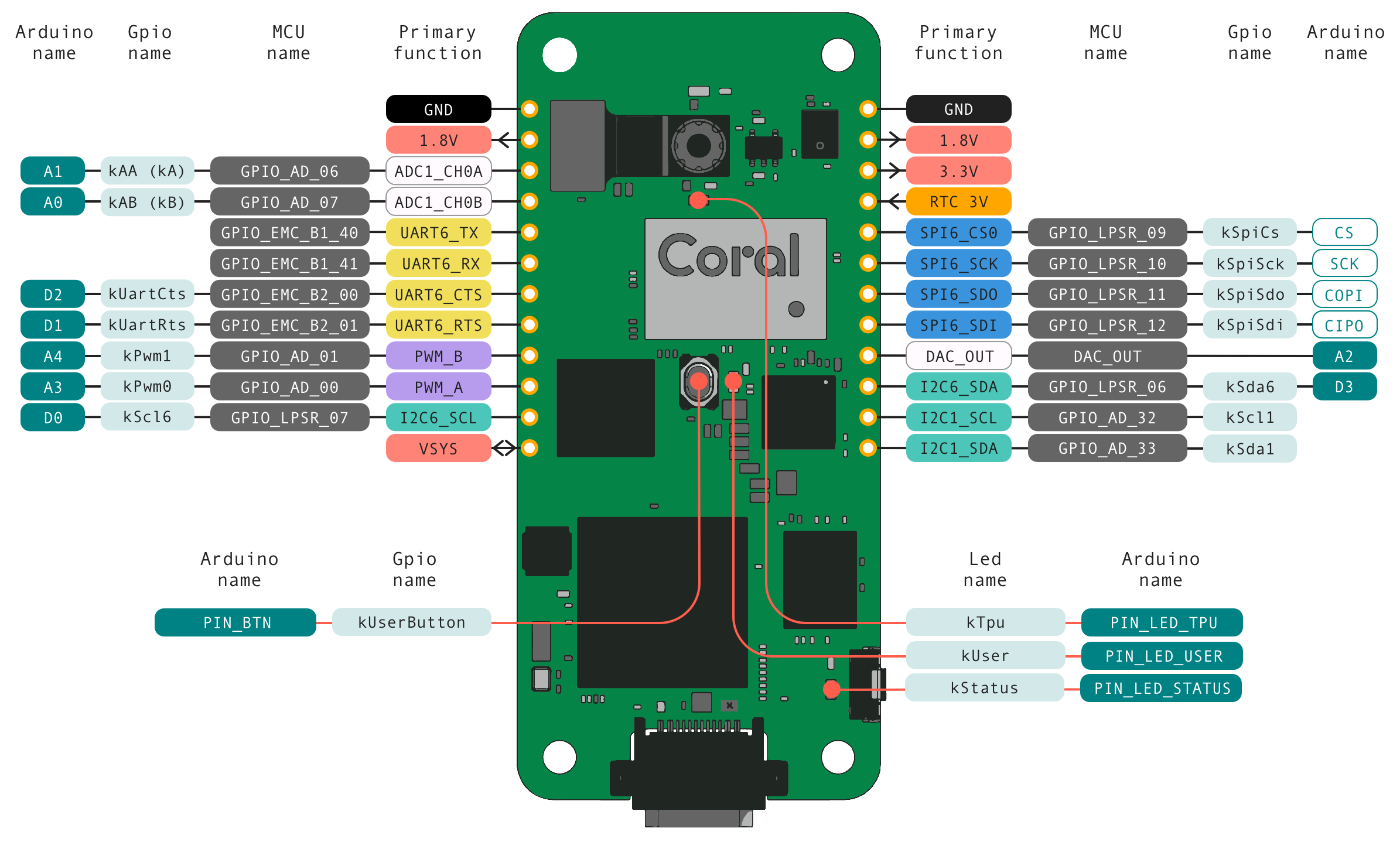
You can interact with GPIO pins (digital or analog input/output pins) on the Dev Board Micro 12-pin headers with Arduino the same as you would on other Arduino boards, using Arduino APIs such as digitalRead(), digitalWrite(), analogRead(), and analogWrite(). To address these GPIO pins, use the Arduino pin names shown in figure 1.
Likewise, you can use digitalWrite() to toggle the on-board LEDs and digitalRead() to listen for User button presses.
Once booting is complete, all digital/analog pins are set to a high-Z (floating) state, except for the I2C pins, which default to high. So be sure to call pinMode() before reading or writing values.
Note
All GPIO pins are powered by the 1.8 V power rail, and provide a max current of approximately 6 mA on most pins.
Example:
This code toggles the on-board User LED when you press the on-board User button.
#include "Arduino.h"
int led_pin = PIN_LED_USER;
int button_pin = PIN_BTN;
PinStatus val = LOW;
void setup() {
Serial.begin(115200);
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino Button LED!");
pinMode(led_pin, OUTPUT);
pinMode(button_pin, INPUT);
}
void loop() {
val = digitalRead(button_pin);
digitalWrite(led_pin, val == LOW ? HIGH : LOW);
}
For more information about using digital and analog pins, see the Arduino GPIO documentation.
I2C
You can interact with I2C devices on the Dev Board Micro using the Arduino Wire library.
Only one pair of I2C lines on the 12-pin headers is available in Arduino,
so you do not need to specify the pin names. It is assumed that you are
connected to D0 and D3 (shown in figure 1).
Example:
This code sends messages to an I2C device that’s connected to D0 and D3.
#include <cstdint>
#include <vector>
#include "Arduino.h"
#include "Wire.h"
namespace {
constexpr int kTargetAddress = 0x42;
constexpr int kTransferSize = 16;
std::vector<uint8_t> buffer(kTransferSize, 0);
} // namespace
void requestEvent() { Wire.write(buffer.data(), kTransferSize); }
void receiveEvent(int count) {
for (int i = 0; i < count && i < kTransferSize; ++i) {
buffer[i] = Wire.read();
Serial.print(buffer[i]);
}
Serial.println();
}
void setup() {
Serial.begin(115200);
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino I2C Target Example!");
Wire.begin(kTargetAddress);
Wire.onReceive(receiveEvent);
Wire.onRequest(requestEvent);
}
void loop() {}
SPI
You can interact with Serial Peripheral Interface (SPI) devices connected to the SPI pins on the 12-pin headers (see figure 1), using the APIs described below. The Dev Board Micro must be the controller.
Only one SPI bus available on the 12-pin headers, so you do not need to specify the pin names.
Note
This SPI is designed to be compatible with the Arduino SPI library,
but our API is a little different because the Dev Board Micro does not
support using SPI from interrupts. Thus, instead of beginTransaction(),
you must set the SPISettings
with updateSettings() and then
call begin(). Also,
legacy functions setBitOrder() and setClockDivider() are not
supported because you should instead use
updateSettings().
To learn more about using SPI with Arduino, read the Arduino & SPI documentation.
Example (from sketches/SPI/):
#include "Arduino.h"
#include "SPI.h"
static uint8_t count = 0;
void setup() {
Serial.begin(115200);
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino SPI Example!");
SPI.begin();
}
void loop() {
Serial.println("Executing a SPI transaction.");
if (SPI.transfer(count) == count) {
Serial.println("Transaction success!");
} else {
Serial.println("Transaction failed!");
}
count++;
count %= 255;
delay(1000);
}
-
namespace
coralmicro -
namespace
arduino -
class
HardwareSPI: public arduino::HardwareSPI¶ - #include <SPI.h>
Allows for communication with SPI devices. SPI devices communicate through the use of the
transferfunctions, which simultaneously exchange data between the two devices, but they cannot be used from within interrupts.You should not initialize this object yourself; instead include
SPI.hand then use the globalSPIinstance. Code samples can be found insketches/SPI/andsketches/SPITranscation/.Public Functions
-
uint8_t
transfer(uint8_t data)¶ Exchanges one byte of data with SPI transfer.
- Parameters
data – The data for the peripheral device.
- Returns
The data received from the peripheral device.
-
uint16_t
transfer16(uint16_t data)¶ Exchanges two bytes of data with SPI transfer.
- Parameters
data – The data for the peripheral device.
- Returns
The data received from the peripheral device.
-
void
transfer(void *buf, size_t count)¶ Exchanges an array of data in-place with SPI transfer.
- Parameters
buf – The data for the peripheral device. As data is received, the buffer is overwritten.
count – The length of the data in bytes.
-
void
updateSettings(arduino::SPISettings settings)¶ Updates the SPI configuration.
- Parameters
settings – The desired SPI configuration. See SPISettings.
-
void
begin()¶ Initializes SPI.
This function must be called before doing any transfers.
-
void
end()¶ De-initializes SPI.
-
uint8_t
-
class
-
namespace
Variables
-
coralmicro::arduino::HardwareSPI
SPI¶ This is the global
HardwareSPIinstance you should use instead of creating your own instance.
Network
Sockets¶
These APIs define the basic interface for socket connections, whether using Wi-Fi or Ethernet.
To open a socket as a client or server, you should use
the corresponding typedef aliases, corresponding to the type of network
connection you’re using:
WiFiClient/WiFiServer
or
EthernetClient/EthernetServer.
-
namespace
coralmicro -
namespace
arduino -
class
SocketClient: public arduino::Client¶ - #include <SocketClient.h>
This is not meant to be instantiated directly. Instead use
arduino::WiFiClientorarduino::EthernetClient.Public Functions
-
inline virtual
~SocketClient()¶
-
SocketClient() = default¶ Initializes a new client socket.
-
SocketClient(const SocketClient &orig) = delete¶
-
SocketClient &
operator=(const SocketClient &orig) = delete¶
-
inline
SocketClient(SocketClient &&orig)¶
-
inline SocketClient &
operator=(SocketClient &&orig)¶
-
int
connect(IPAddress ip, uint16_t port) override¶ Start a socket connection with a server.
- Parameters
ip – The server’s ip address.
port – The server’s port number.
- Returns
1 if successful; -1 otherwise.
-
int
connect(const char *host, uint16_t port) override¶ Starts a socket connection with a server.
- Parameters
ip – The server’s hostname.
port – The server’s port number.
- Returns
1 if successful; -1 otherwise.
-
size_t
write(uint8_t c) override¶ Writes some data to the socket.
- Parameters
c – The data to write.
- Returns
1 if successful; -1 otherwise.
-
size_t
write(const uint8_t *buf, size_t size) override¶ Writes an array of data to the socket.
- Parameters
array – The array of data to write.
size – The size of the array.
- Returns
The size of the array written if successful; -1 otherwise.
-
int
available() override¶ Checks if the socket has bytes available to read.
- Returns
The number of bytes available to read.
-
int
read() override¶ Reads some data from the socket.
- Returns
The data if successful; -1 otherwise.
-
int
read(uint8_t *buf, size_t size) override¶ Reads an array of data from the socket.
- Parameters
The – buffer in which to put the data.
The – size of the buffer.
- Returns
The size of the array read if successful; -1 otherwise.
-
void
stop() override¶ Close the socket.
-
uint8_t
connected() override¶ Checks if the socket is connected.
- Returns
True if connected; false otherwise.
-
operator bool() override¶ True if the socket is connected; false otherwise.
-
inline virtual
-
class
-
namespace
-
namespace
coralmicro -
namespace
arduino -
class
SocketServer: public arduino::Server¶ - #include <SocketServer.h>
This is not meant to be instantiated directly. Instead use
arduino::WiFiServerorarduino::EthernetServer.Public Functions
-
inline
SocketServer(int port)¶ Initializes a new server socket.
Each server socket can accept just one client connection.
- Parameters
The – port number to use.
-
virtual
~SocketServer()¶
-
void
begin() override¶ Starts the socket.
-
size_t
write(uint8_t c) override¶ Writes some data to the socket.
- Parameters
c – The data to write.
- Returns
1 if successful; -1 otherwise.
-
size_t
write(const uint8_t *buf, size_t size) override¶ Writes an array of data to the socket.
- Parameters
array – The array of data to write.
size – The size of the array.
- Returns
The size of the array written if successful; -1 otherwise.
-
SocketClient
available()¶ Waits for and accepts a socket connection from a client. This is a blocking call and returns only when a client has connected to this server socket’s port.
Note: Only one client can connect at a time.
- Returns
The client object to read and write with the connected client. Before using the returned client, check if the client is connected (check if the object evaluates true or call
arduino::SocketClient::connected()) and check if it has data to read witharduino::SocketClient::available().
-
inline
-
class
-
namespace
Wi-Fi¶
Note
Requires the Coral Wireless Add-on board.
To use Wi-Fi on the Dev Board Micro:
Use
WiFiClassto connect to a Wi-Fi network.Use
WiFiClientto connect to a server, or useWiFiServerto host a server on the board.
-
namespace
coralmicro -
namespace
arduino -
class
WiFiClass¶ - #include <WiFi.h>
Allows for scanning for and connecting to Wi-Fi networks.
Connection is initiated with the
WiFiClass::begin()functions, which connect to a specified access point. Scanning can be executed via `WiFiClass::scanNetworks()and the results can be retrieved with the SSID/RSSI/encryptionType methods that acceptnetworkItem.You should not initialize this object yourself, instead include
WiFi.hand use the globalarduino::WiFiinstance.This API is designed to be code-compatible with projects that use the
WiFiclass from the Arduino WiFi library.Example: This code connects to a Wi-Fi network and prints network details.
#include "Arduino.h" #include "WiFi.h" const char kSsid[] = "great-access-point"; const char kPsk[] = "letmein"; void printMacAddress(uint8_t* mac) { Serial.print(mac[0], HEX); Serial.print(":"); Serial.print(mac[1], HEX); Serial.print(":"); Serial.print(mac[2], HEX); Serial.print(":"); Serial.print(mac[3], HEX); Serial.print(":"); Serial.print(mac[4], HEX); Serial.print(":"); Serial.print(mac[5], HEX); } void setup() { Serial.begin(115200); // Turn on Status LED to show the board is on. pinMode(PIN_LED_STATUS, OUTPUT); digitalWrite(PIN_LED_STATUS, HIGH); Serial.println("Arduino Wi-Fi Connect!"); int connected = WL_DISCONNECTED; if (strlen(kPsk) > 0) { connected = WiFi.begin(kSsid, kPsk); } else { connected = WiFi.begin(kSsid); } if (connected == WL_CONNECTED) { Serial.print("Connected to network "); Serial.println(WiFi.SSID()); } else { Serial.println("Failed to connect to network."); return; } uint8_t mac[6]; WiFi.macAddress(mac); uint8_t bssid[6]; WiFi.BSSID(bssid); Serial.print("Our MAC address: "); printMacAddress(mac); Serial.println(); Serial.print("Network BSSID: "); printMacAddress(bssid); Serial.println(); int32_t rssi = WiFi.RSSI(); Serial.print("Network RSSI: "); Serial.println(rssi); IPAddress ip = WiFi.localIP(); Serial.print("Ip address: "); Serial.println(ip); WiFi.disconnect(); } void loop() {}
Public Functions
-
int
begin(const char *ssid)¶ Connects to an open Wi-Fi network.
- Parameters
ssid – The SSID to connect to.
- Returns
WL_CONNECTED on success; WL_CONNECT_FAILED otherwise.
-
int
begin(const char *ssid, const char *passphrase)¶ Connects to a Wi-Fi network using a passphrase.
- Parameters
ssid – The SSID to connect to.
passphrase – The passphrase used to connect to the network.
- Returns
WL_CONNECTED on success; WL_CONNECT_FAILED otherwise.
-
int
disconnect()¶ Disconnects from the associated Wi-Fi network.
- Returns
WL_DISCONNECTED on success.
-
char *
SSID()¶ Retrieves the SSID of the associated Wi-Fi network.
- Returns
SSID if the device is connected to a network, empty string otherwise.
-
char *
SSID(uint8_t networkItem)¶ Retrieves the SSID of the
networkItem-th scan result.- Returns
SSID of the scan result.
-
uint8_t *
BSSID(uint8_t *bssid)¶ Retrieves the BSSID of the access point.
- Parameters
bssid – Pointer to memory where BSSID will be stored.
- Returns
Address of BSSID on success; nullptr otherwise.
-
int32_t
RSSI()¶ Retrieves the RSSI of the associated Wi-Fi network.
- Returns
RSSI if the device is connected to a network, INT_MIN otherwise.
-
int32_t
RSSI(uint8_t networkItem)¶ Retrieves the RSSI of the
networkItem-th scan result.- Returns
RSSI of the scan result.
-
uint8_t
encryptionType()¶ Retrieves the encryption type of the associated Wi-Fi network.
- Returns
Value from
enum encryption_typerepresenting the network security.
-
uint8_t
encryptionType(uint8_t networkItem)¶ Retrieves the encryption type of the
networkItem-th scan result.- Returns
encryption_typerepresenting the network security.
-
int8_t
scanNetworks()¶ Scans for nearby Wi-Fi networks.
- Returns
The number of networks discovered.
-
uint8_t
status()¶ Retrieves the status of the Wi-Fi connection.
- Returns
wl_status_typerepresenting the connection status.
-
uint8_t *
macAddress(uint8_t *mac)¶ Retrieves the MAC address of the Wi-Fi module.
- Parameters
bssid – Pointer to memory where the MAC will be stored.
- Returns
Address of MAC on success; nullptr otherwise.
-
IPAddress
localIP()¶ Retrieves the board’s wifi ip address.
- Returns
The wifi ip address of the board.
-
int
Typedefs
-
using
WiFiClient= SocketClient¶ Defines a client-side connection to a server using Wi-Fi.
This is an alias for the
arduino::SocketClientclass, where all the available functions are defined.Example:
This code connects to a Wi-Fi network, connects to a server via hostname and port, then sends an HTTP GET request and prints the response.
#include "Arduino.h" #include "WiFi.h" namespace { const char kSsid[] = "great-access-point"; const char kPsk[] = "letmein"; coralmicro::arduino::WiFiClient client; } // namespace void setup() { Serial.begin(115200); // Turn on Status LED to show the board is on. pinMode(PIN_LED_STATUS, OUTPUT); digitalWrite(PIN_LED_STATUS, HIGH); Serial.println("Arduino WiFiClient!"); int connected = WL_DISCONNECTED; if (strlen(kPsk) > 0) { connected = WiFi.begin(kSsid, kPsk); } else { connected = WiFi.begin(kSsid); } if (connected == WL_CONNECTED) { Serial.print("Connected to network "); Serial.println(WiFi.SSID()); } else { Serial.println("Failed to connect to network."); return; } if (!client.connect("www.example.com", 80)) { Serial.println("Connection failed."); return; } Serial.println("Connection successful!"); const char* kHttpGet = "GET / HTTP/1.1\r\nHost: www.example.com\r\n\r\n"; client.write(reinterpret_cast<const uint8_t*>(kHttpGet), strlen(kHttpGet)); } void loop() { if (client && client.available()) { Serial.write(client.read()); } }
-
using
WiFiServer= SocketServer¶ Defines a server using Wi-Fi.
This is an alias for the
arduino::SocketServerclass, where all the available functions are defined.Example:
This code starts a server on the board and, when a client connects to it, it prints all data read from the client to the board serial console.
#include "Arduino.h" #include "WiFi.h" namespace { const char kSsid[] = "great-access-point"; const char kPsk[] = "letmein"; coralmicro::arduino::WiFiClient client; coralmicro::arduino::WiFiServer server(31337); } // namespace void setup() { Serial.begin(115200); // Turn on Status LED to show the board is on. pinMode(PIN_LED_STATUS, OUTPUT); digitalWrite(PIN_LED_STATUS, HIGH); Serial.println("Arduino WiFiServer!"); int connected = WL_DISCONNECTED; if (strlen(kPsk) > 0) { connected = WiFi.begin(kSsid, kPsk); } else { connected = WiFi.begin(kSsid); } if (connected == WL_CONNECTED) { Serial.print("Connected to network "); Serial.println(WiFi.SSID()); } else { Serial.println("Failed to connect to network."); return; } IPAddress ip = WiFi.localIP(); server.begin(); Serial.print("Our IP address is "); Serial.println(ip); Serial.println("Server ready on port 31337"); // Blocks until a client is connected. client = server.available(); } void loop() { // If a client is connected and has data available to read, // write the data to the serial console. if (client && client.available()) { Serial.write(client.read()); Serial.flush(); } }
-
class
-
namespace
Enums
Variables
-
coralmicro::arduino::WiFiClass
WiFi¶ This is the global
WiFiClassinstance you should use instead of creating your own instance.
Ethernet¶
Note
Requires the Coral PoE Add-on board.
To use Ethernet on the Dev Board Micro:
Call
coralmicro::arduino::EthernetClass::begin()to enable the Ethernet connection.Use
EthernetClientto connect to a server, or useEthernetServerto host a server on the board.
-
namespace
coralmicro -
namespace
arduino -
class
EthernetClass¶ - #include <Ethernet.h>
Allows for connection of the device to a network via Ethernet. At the moment, this interface only supports networks with DHCP. After a connection is established, information about the connection such as IP address, DNS, and gateway can be retrieved. You should not initialize this object yourself, instead include
Ethernet.hand use the globalEthernetinstance.Public Functions
-
int
begin()¶ Variant of begin that only uses DHCP.
- Returns
1 if DHCP was successful; 0 otherwise.
-
int
begin(IPAddress ip)¶ Initializes an Ethernet connection, using the specified IP address. The DNS server will be the IP address with the final octet as 1. The gateway will be the IP address with the final octet as 1. The subnet mask will be 255.255.255.0.
- Parameters
ip – The desired IP address.
- Returns
1 if Ethernet is brought up successfully.
-
int
begin(IPAddress ip, IPAddress dns_server)¶ Initializes an Ethernet connection, using the specified IP address and DNS server. The gateway will be the IP address with the final octet as 1. The subnet mask will be 255.255.255.0.
- Parameters
ip – The desired IP address.
dns_server – The IP address of a DNS server.
- Returns
1 if Ethernet is brought up successfully.
-
int
begin(IPAddress ip, IPAddress dns_server, IPAddress gateway)¶ Initializes an Ethernet connection, using the specified IP address, DNS server, and gateway. The subnet mask will be 255.255.255.0.
- Parameters
ip – The desired IP address.
dns_server – The IP address of a DNS server.
gateway – The IP address of the network gateway.
- Returns
1 if Ethernet is brought up successfully.
-
int
begin(IPAddress ip, IPAddress dns_server, IPAddress gateway, IPAddress subnet_mask)¶ Initializes an Ethernet connection, using the specified IP address, DNS server, gateway, and subnet mask.
- Parameters
ip – The desired IP address.
dns_server – The IP address of a DNS server.
gateway – The IP address of the network gateway.
subnet_mask – The subnet mask for the network.
- Returns
1 if Ethernet is brought up successfully.
-
IPAddress
localIP()¶ Returns the IP address of the device.
- Returns
The Ethernet IP address of the device.
-
IPAddress
subnetMask()¶ Returns the subnet mask of Ethernet connection.
- Returns
The subnet mask of the connection.
-
IPAddress
gatewayIP()¶ Returns the gateway of the Ethernet connection.
- Returns
The IP of the network gateway.
-
IPAddress
dnsServerIP()¶ Returns the primary DNS server of the device.
- Returns
The IP of the primary DNS server.
-
void
MACAddress(uint8_t *mac)¶ Retrieves the MAC address of the Ethernet interface.
- Parameters
mac – Pointer to memory where the MAC address will be stored.
-
EthernetLinkStatus
linkStatus()¶ Returns the status of the Ethernet connection.
- Returns
EthernetLinkStatusrepresenting the state of the connection.
-
int
Typedefs
-
using
EthernetClient= SocketClient¶ Defines a client-side connection to a server using Ethernet.
This is an alias for the
arduino::SocketClientclass, where all the available functions are defined.Example:
This code enables the Ethernet connection, connects to a server via hostname and port, then sends an HTTP GET request and prints the response.
#include "Arduino.h" #include "Ethernet.h" namespace { coralmicro::arduino::EthernetClient client; } void setup() { Serial.begin(115200); pinMode(PIN_LED_STATUS, OUTPUT); digitalWrite(PIN_LED_STATUS, HIGH); Serial.println("Arduino EthernetClient!"); if (!Ethernet.begin()) { Serial.println("DHCP failed to get an IP."); return; } if (!client.connect("www.example.com", 80)) { Serial.println("Connection failed."); return; } Serial.println("Connection successful!"); const char* kHttpGet = "GET / HTTP/1.1\r\nHost: www.example.com\r\n\r\n"; client.write(reinterpret_cast<const uint8_t*>(kHttpGet), strlen(kHttpGet)); } void loop() { if (client && client.available()) { Serial.write(client.read()); } }
-
using
EthernetServer= SocketServer¶ Defines a server using Ethernet.
This is an alias for the
arduino::SocketServerclass, where all the available functions are defined.Example:
This code starts a server on the board and, when a client connects to it, it prints all data read from the client to the board serial console.
#include "Arduino.h" #include "Ethernet.h" namespace { coralmicro::arduino::EthernetClient client; coralmicro::arduino::EthernetServer server(31337); } // namespace void setup() { Serial.begin(115200); pinMode(PIN_LED_STATUS, OUTPUT); digitalWrite(PIN_LED_STATUS, HIGH); Serial.println("Arduino EthernetServer!"); if (!Ethernet.begin()) { Serial.println("DHCP failed to get an IP."); return; } if (!client.connect("www.example.com", 80)) { Serial.println("Connection failed."); return; } Serial.println("Connection successful!"); IPAddress ip = Ethernet.localIP(); server.begin(); Serial.print("Our IP address is "); Serial.println(ip); Serial.println("Server ready on port 31337"); // Blocks until a client is connected. client = server.available(); } void loop() { // If a client is connected and has data available to read, // write the data to the serial console. if (client && client.available()) { Serial.write(client.read()); Serial.flush(); } }
-
class
-
namespace
Enums
Variables
-
coralmicro::arduino::EthernetClass
Ethernet¶ This is the global
EthernetClassinstance you should use instead of creating your own instance.
TensorFlow Lite
To run inference with TensorFlow Lite models in Arduino, you’ll use the same TensorFlow Lite Micro APIs that are used with FreeRTOS apps. Of course, the rest of your code can continue using the Arduino language and other Arduino-style APIs such as Camera.
Example:
This code performs object detection with TensorFlow Lite using images from the camera.
#include <coralmicro_SD.h>
#include <coralmicro_camera.h>
#include <cstdint>
#include <memory>
#include "Arduino.h"
#include "coral_micro.h"
#include "libs/rpc/rpc_http_server.h"
#include "libs/tensorflow/detection.h"
using namespace coralmicro;
using namespace coralmicro::arduino;
namespace {
bool setup_success{false};
int button_pin = PIN_BTN;
int last_button_state = LOW;
int current_button_state = HIGH;
unsigned long last_debounce_time = 0;
constexpr unsigned long kDebounceDelay = 50;
tflite::MicroMutableOpResolver<3> resolver;
const tflite::Model* model = nullptr;
std::vector<uint8_t> model_data;
std::shared_ptr<coralmicro::EdgeTpuContext> context = nullptr;
std::unique_ptr<tflite::MicroInterpreter> interpreter = nullptr;
TfLiteTensor* input_tensor = nullptr;
int model_height;
int model_width;
constexpr char kModelPath[] =
"/models/tf2_ssd_mobilenet_v2_coco17_ptq_edgetpu.tflite";
std::vector<tensorflow::Object> results;
constexpr int kTensorArenaSize = 8 * 1024 * 1024;
STATIC_TENSOR_ARENA_IN_SDRAM(tensor_arena, kTensorArenaSize);
FrameBuffer frame_buffer;
bool DetectFromCamera() {
if (Camera.grab(frame_buffer) != CameraStatus::SUCCESS) {
return false;
}
std::memcpy(tflite::GetTensorData<uint8_t>(input_tensor),
frame_buffer.getBuffer(), frame_buffer.getBufferSize());
if (interpreter->Invoke() != kTfLiteOk) {
return false;
}
results = tensorflow::GetDetectionResults(interpreter.get(), 0.6f, 3);
return true;
}
void DetectRpc(struct jsonrpc_request* r) {
if (!setup_success) {
jsonrpc_return_error(
r, -1, "Inference failed because setup was not successful", nullptr);
return;
}
if (!DetectFromCamera()) {
jsonrpc_return_error(r, -1, "Failed to run classification from camera.",
nullptr);
return;
}
if (!results.empty()) {
const auto& result = results[0];
jsonrpc_return_success(
r,
"{%Q: %d, %Q: %d, %Q: %V, %Q: {%Q: %d, %Q: %g, %Q: %g, %Q: %g, "
"%Q: %g, %Q: %g}}",
"width", model_width, "height", model_height, "base64_data",
frame_buffer.getBufferSize(), frame_buffer.getBuffer(), "detection",
"id", result.id, "score", result.score, "xmin", result.bbox.xmin,
"xmax", result.bbox.xmax, "ymin", result.bbox.ymin, "ymax",
result.bbox.ymax);
return;
}
jsonrpc_return_success(r, "{%Q: %d, %Q: %d, %Q: %V, %Q: None}", "width",
model_width, "height", model_height, "base64_data",
frame_buffer.getBufferSize(), frame_buffer.getBuffer(),
"detection");
}
} // namespace
void setup() {
Serial.begin(115200);
// Turn on Status LED to show the board is on.
pinMode(PIN_LED_STATUS, OUTPUT);
digitalWrite(PIN_LED_STATUS, HIGH);
Serial.println("Arduino Camera Detection!");
pinMode(button_pin, INPUT);
SD.begin();
Serial.println("Loading Model");
if (!SD.exists(kModelPath)) {
Serial.println("Model file not found");
return;
}
SDFile model_file = SD.open(kModelPath);
uint32_t model_size = model_file.size();
model_data.resize(model_size);
if (model_file.read(model_data.data(), model_size) != model_size) {
Serial.print("Error loading model");
return;
}
model = tflite::GetModel(model_data.data());
context = coralmicro::EdgeTpuManager::GetSingleton()->OpenDevice();
if (!context) {
Serial.println("Failed to get EdgeTpuContext");
return;
}
Serial.println("model and context created");
tflite::MicroErrorReporter error_reporter;
resolver.AddDequantize();
resolver.AddDetectionPostprocess();
resolver.AddCustom(coralmicro::kCustomOp, coralmicro::RegisterCustomOp());
interpreter = std::make_unique<tflite::MicroInterpreter>(
model, resolver, tensor_arena, kTensorArenaSize, &error_reporter);
if (interpreter->AllocateTensors() != kTfLiteOk) {
Serial.println("allocate tensors failed");
return;
}
if (!interpreter) {
Serial.println("Failed to make interpreter");
return;
}
if (interpreter->inputs().size() != 1) {
Serial.println("Bad inputs size");
Serial.println(interpreter->inputs().size());
return;
}
input_tensor = interpreter->input_tensor(0);
model_height = input_tensor->dims->data[1];
model_width = input_tensor->dims->data[2];
if (Camera.begin(model_width, model_height, coralmicro::CameraFormat::kRgb,
coralmicro::CameraFilterMethod::kBilinear,
coralmicro::CameraRotation::k270,
true) != CameraStatus::SUCCESS) {
Serial.println("Failed to start camera");
return;
}
Serial.println("Initializing detection server...");
jsonrpc_init(nullptr, nullptr);
jsonrpc_export("detect_from_camera", DetectRpc);
UseHttpServer(new JsonRpcHttpServer);
Serial.println("Detection server ready!");
setup_success = true;
Serial.println("Initialized");
}
void loop() {
int reading = digitalRead(button_pin);
if (reading != last_button_state) {
last_debounce_time = millis();
}
if ((millis() - last_debounce_time) > kDebounceDelay) {
if (reading != current_button_state) {
current_button_state = reading;
if (current_button_state == HIGH) {
Serial.println("Button triggered, running detection...");
if (!setup_success) {
Serial.println("Cannot run because of a problem during setup!");
return;
}
if (!DetectFromCamera()) {
Serial.println("Failed to run detection");
return;
}
Serial.print("Results count: ");
Serial.println(results.size());
for (auto result : results) {
Serial.print("id: ");
Serial.print(result.id);
Serial.print(" score: ");
Serial.print(result.score);
Serial.print(" xmin: ");
Serial.print(result.bbox.xmin);
Serial.print(" ymin: ");
Serial.print(result.bbox.ymin);
Serial.print(" xmax: ");
Serial.print(result.bbox.xmax);
Serial.print(" ymax: ");
Serial.println(result.bbox.ymax);
}
}
}
}
last_button_state = reading;
}
Is this content helpful?